|
|

|

|
| e-Pub |
Section: New Results
Situation Awareness
Participants : Christian Laugier, Olivier Simonin, Jilles Dibangoye, Alejandro Dizan Vasquez Govea [Apple since January 2016] , Stephanie Lefevre [Mercedes-Benz North America] , David Sierra-Gonzalez, Mathieu Barbier, Victor Romero-Cano.
Framework for Motion Prediction and Collision Risk Assessment
Participants : Christian Laugier, Alejandro Dizan Vasquez Govea [Apple since January 2016] , Stephanie Lefevre [Mercedes-Benz North America] , Lukas Rummelhard.
For several years, the challenging scientific problem of Motion Prediction, Risk Assessment and Decision-Making in open and dynamic environments has been one of our main research topics (see activity reports of the former e-Motion Inria team-project and Chroma team 2015 activity report).
Throughout 2016, we have continued this line of work by developing and experimentally testing new frameworks for Motion Prediction and Collision Risk Assessment in complex dynamic scenes involving multiple moving agents having various behaviors. This work has been conducted in the scope of three main scenarios: Short-term prediction in crowded urban environments (see approach and results in sections 7.1.1 and 7.1.5), Autonomous driving in highway environments (see section 7.2.2), and Safe Intersection crossing.
The main underlying concepts of the developed framework have recently been published in the second edition of the Handbook of Robotics [31]. They have also been presented into a Mooc course on “Autonomous Mobiles Robots and Vehicles”, dedicated to graduate and undergraduate students and to engineers in Robotics [57]. This Mooc has been published twice in 2015 and in 2016.
The recent results have been published at ICRA 2016 [27] and also presented by C. Laugier in several invited talks : Asprom2016 [16], ICIT2016 [14], CUHK2016 [15], GTC-Europe2016 [24] and ARSO2016 [17].
Another contribution relies in the implementation of some the proposed models on two experimental vehicles (Lexus and Zoe experimental platforms). As it has been mentioned in the section 7.1.5, several experiments on short-term collision risk assessment have successfully been conducted with these platforms in 2015 and 2016 (c.f. [84], [67]).
This work will be continued in 2017, in the scope of our ongoing collaborative projects with Toyota, Renault and IRT nanoelec. It will also be used as a support for the planned technological transfers with two industrial companies in the fields of industrial mobile robots and automatic shuttles (see section 7.1.5).
Planning-based motion prediction for collision risk estimation in autonomous driving scenarios
Participants : David Sierra-Gonzalez, Christian Laugier, Jilles Dibangoye, Alejandro Dizan Vasquez Govea [Apple since January 2016] .
The objective is to develop a collision risk estimation system capable of reliably finding the risk of collision associated to the different feasible trajectories of the ego-vehicle. This research work is done in the scope of the Inria-Toyota long-term cooperation and of the PhD thesis work of David Sierra-Gonzáles.
One key factor, and probably the biggest challenge in order to produce robust collision risk estimation in traffic scenes, is the motion prediction of the dynamic obstacles (i.e. the other drivers for highway scenarios). The difficulty stems from the fact that human behavior is determined by a complex set of interdependent factors, which are very hard to model (e.g. intentions, perception, emotions). As a consequence, most existing systems are based on simple short-term motion models assuming constant velocity or acceleration.
We opt here for a planning-based approach, which assumes that drivers instinctively act as to minimize a cost (or equivalently, maximize a reward). This cost function encodes the preferences of the driver to, for instance, keep a minimum distance with the vehicle in front, drive in the right lane in the highway, or respect the speed limits. By using Inverse Reinforcement Learning (IRL) algorithms, we can obtain such cost function directly from expert demonstrations (i.e. simply observing how people drive).
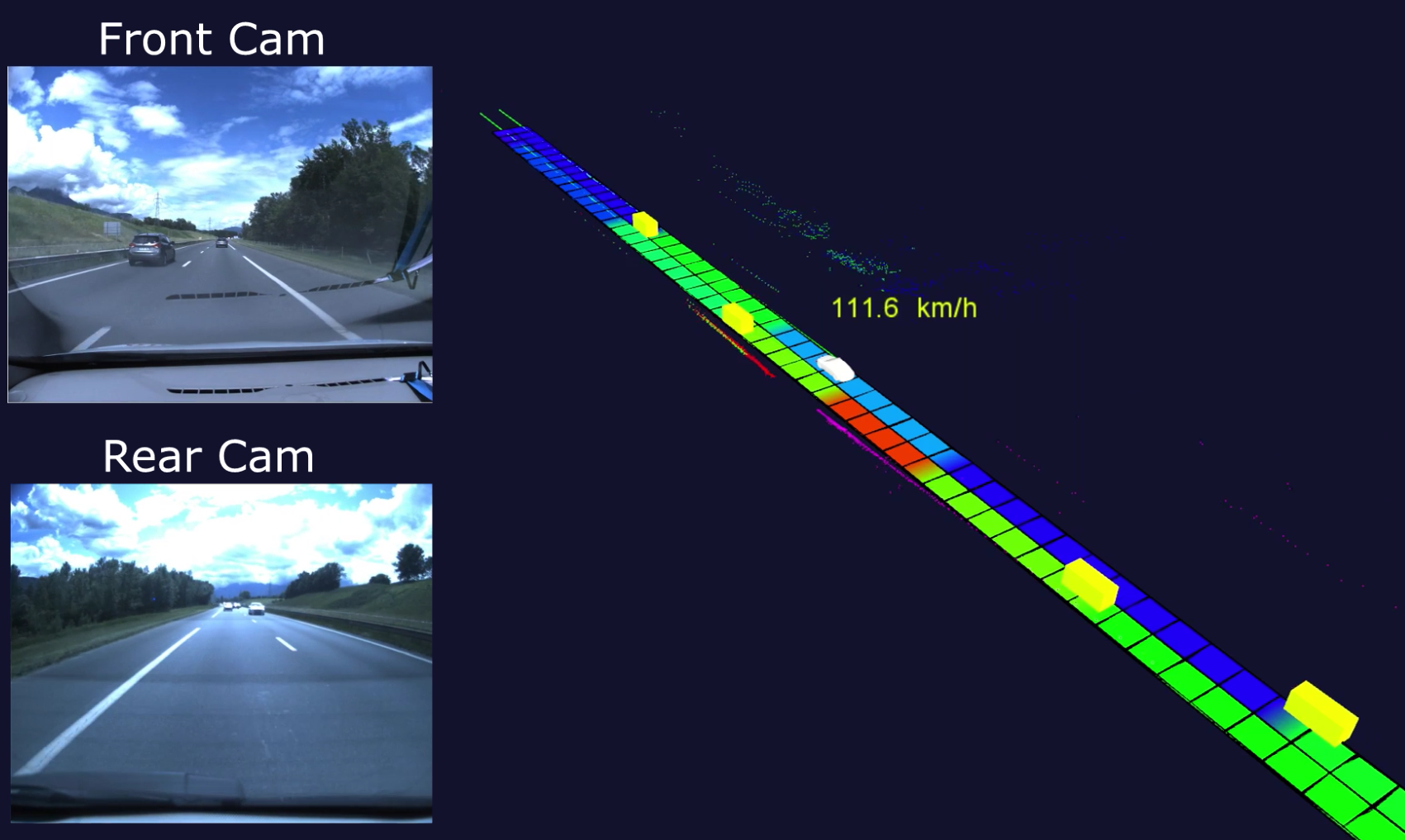
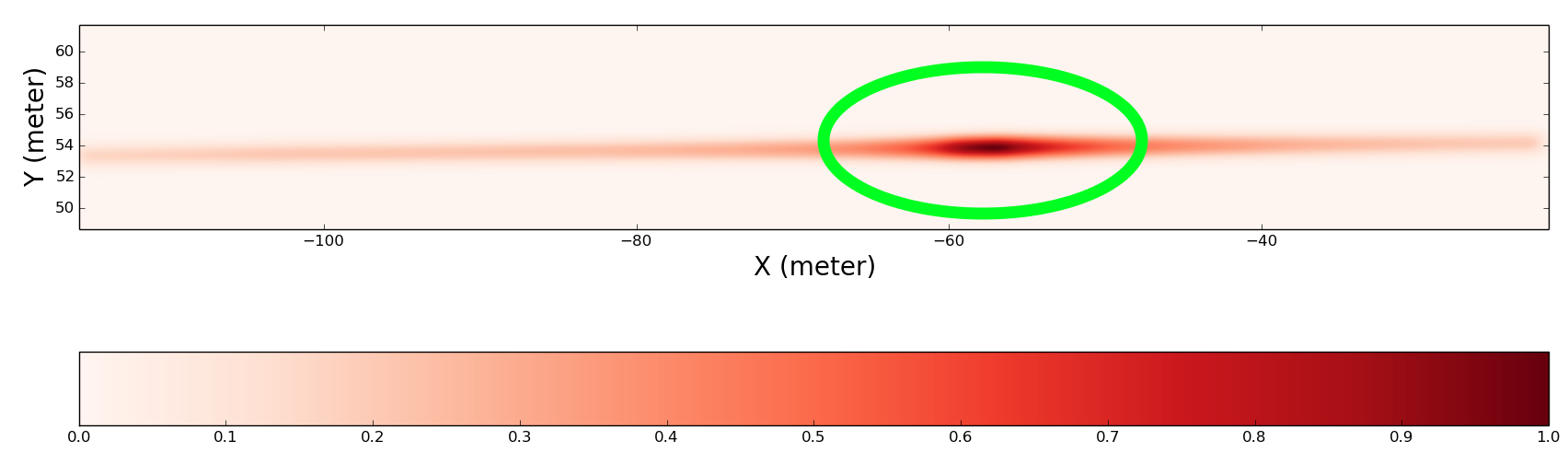
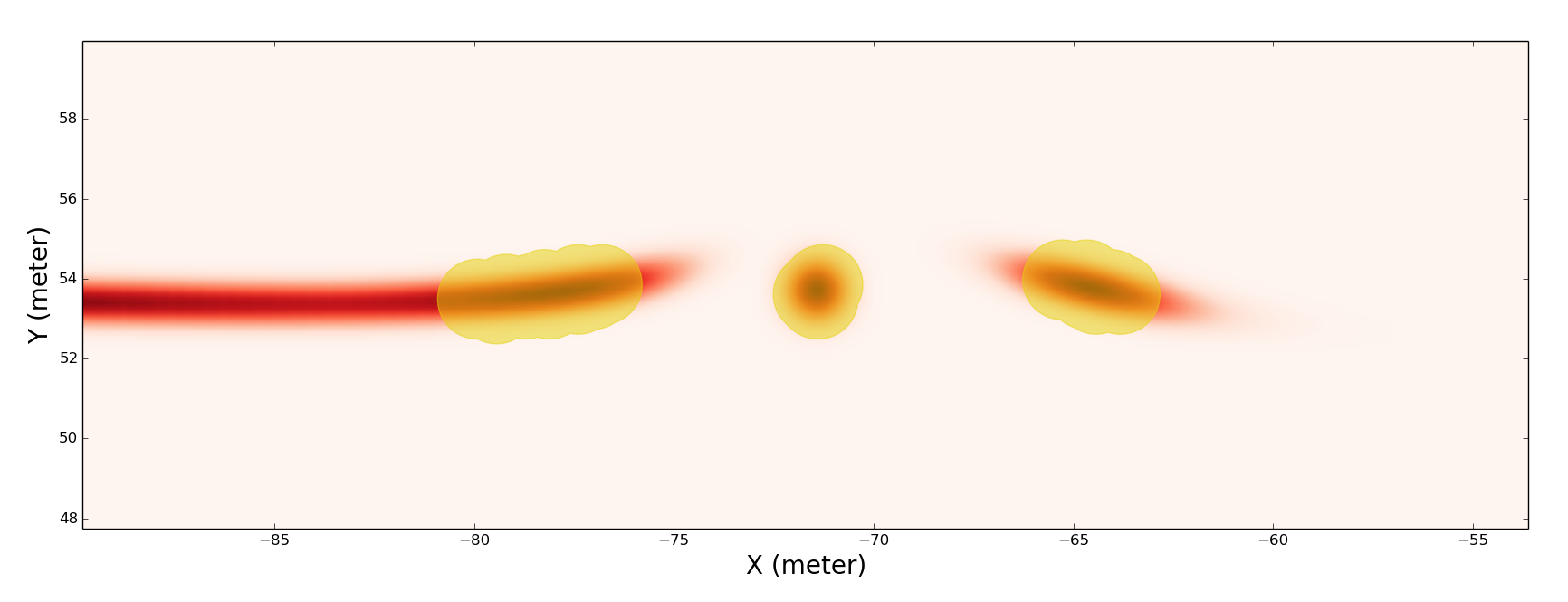
Two well-known IRL algorithms [35], [101] have been implemented and used to obtain driver models from human demonstrations. The algorithms have been adapted to work with simulated demonstrations obtained on a highway simulator, and with real-world data from the Lexus and Renault Zoe platforms. Figure 12.a shows a slice of one such cost function in the context of a real highway scene.
|
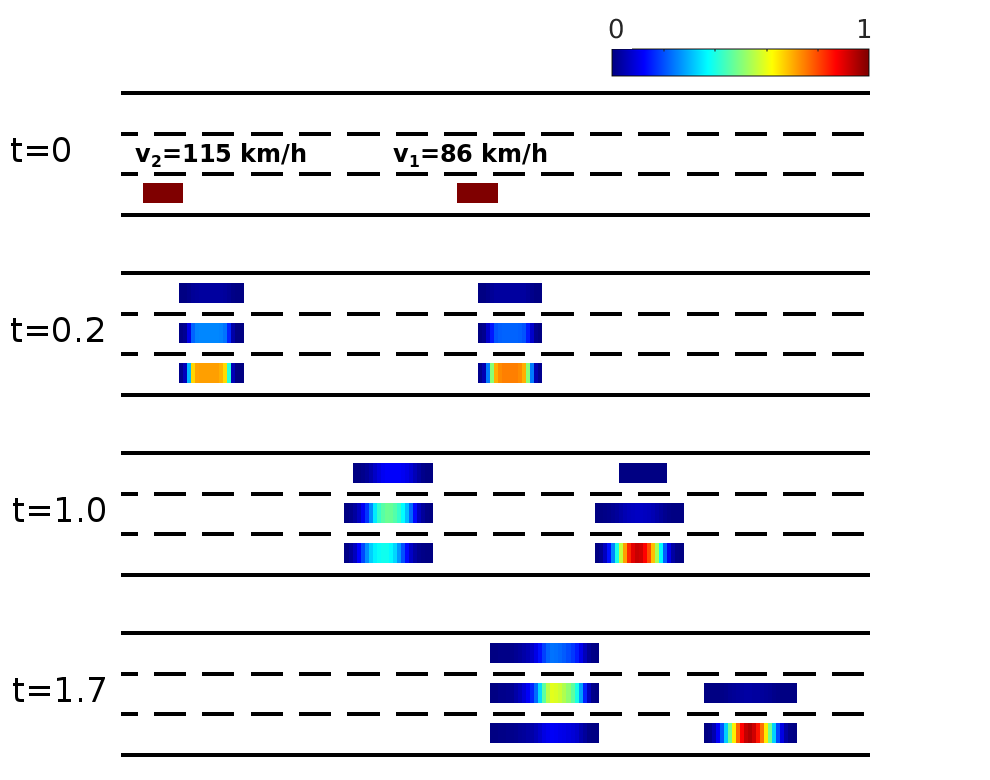
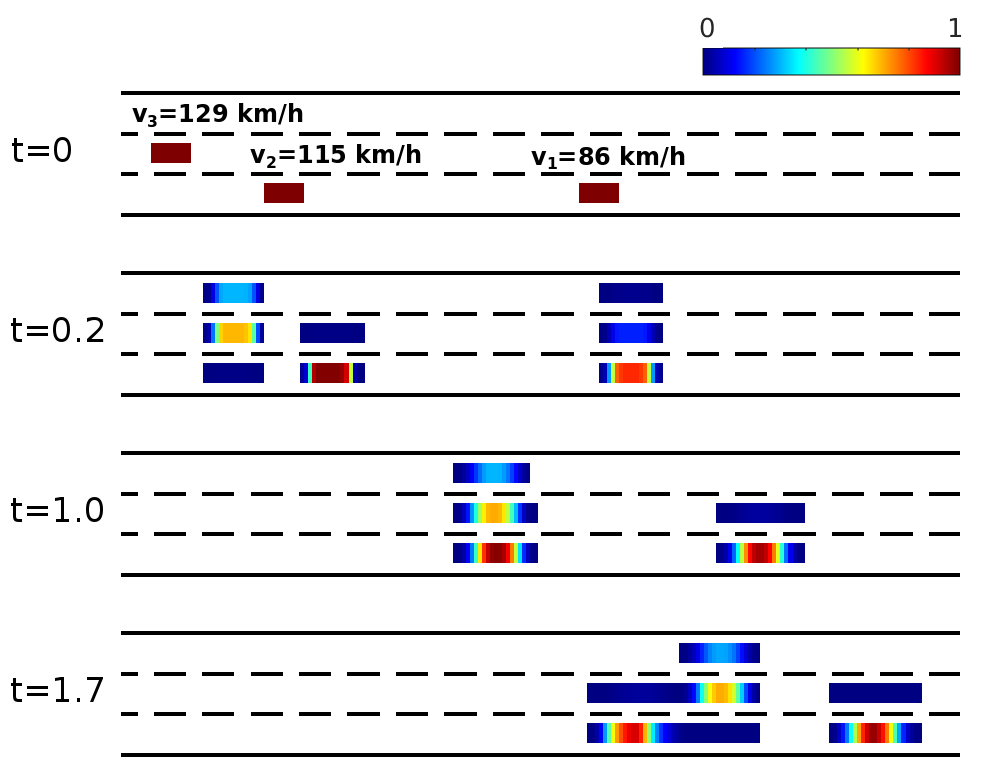
A novel framework has been developed in order to exploit the predictive potential of these models for the task of highway scene prediction [26]. The ability of these dynamic models to capture the risk-aversive behavior of drivers leads to an interaction-aware prediction. In contrast to other state-of-the-art interaction-aware approaches [59], the complexity of our prediction framework does not grow exponentially in the number of vehicles in the scene, but only quadratically. Figure 12.b shows the prediction produced by our framework in two prototypical simulated highway scenarios. The figure shows the result of summing up across the occupancy distributions over a discretization of the road for all the vehicles in the scene, at different timesteps (note that the result is no longer a probability distribution, but it is convenient to visualize the prediction).
This framework has been patented by Inria and Toyota Motor Europe in October 2016.
Functional space representation for automated road intersection crossing
Participants : Mathieu Barbier, Christian Laugier, Olivier Simonin.
The objective is to develop a framework for modeling road intersections using relevant functional areas, which can be exploited by an autonomous vehicle for safely crossing the intersection. These functional areas try to capture various characteristics such as crossing, merging or approaching areas, the car dynamics when moving in such areas, or the related uncertainty. We made the assumption that such a functional space representation can be stored in a map and can be constructed using observed trajectories. This work is performed in the scope of the PhD thesis of Mathieu Barbier, which is supported by a CIFRE fellowship with Renault.
In a preliminary work done with map by Renault, it has been observed that the information stored in a map does not fully match with the real motions executed by cars within a given intersection. The differences between the stored and the real path might be important. This difference is not due to error during the map creation, but rather to other constraints related to the driving action (e.g. visibility, dynamics). Such a difference leads to serious difficulties at the level of the autonomous driving decision-making process.
Constructing a functional model, requires to first analyze the topological and dynamics structure of an intersection, and in a second step to imagine how it would be possible to extract such type of information from maps and observed trajectories. Two main structures seem to emerge from this study:
-
Merging and Crossing points, areas where two cars are the most likely to collide.
-
Approaching areas, areas where drivers are most likely to show constant driving behaviors.
In order to learn motions patterns of multiple cars, we have chosen to train Gaussian processes [81] [93] using simulated data set generated using the SCANER™system. The resulting distribution is segmented using different threshold, in order to find approaching areas and to combine pairs of such areas for constructing overlapping areas. The correlation between this discretization and both real and simulated velocity profiles has been shown by the experimental results, see Fig. 13. The approach has been published at IEEE ITSC 2016 [18].
|

We recently started to make use of a Random Forest classifier to connect features of trajectories with an intended maneuver (stop, pass, yield) and to take advantage of the discretization. This research work will be continued in 2017.